The Challenge
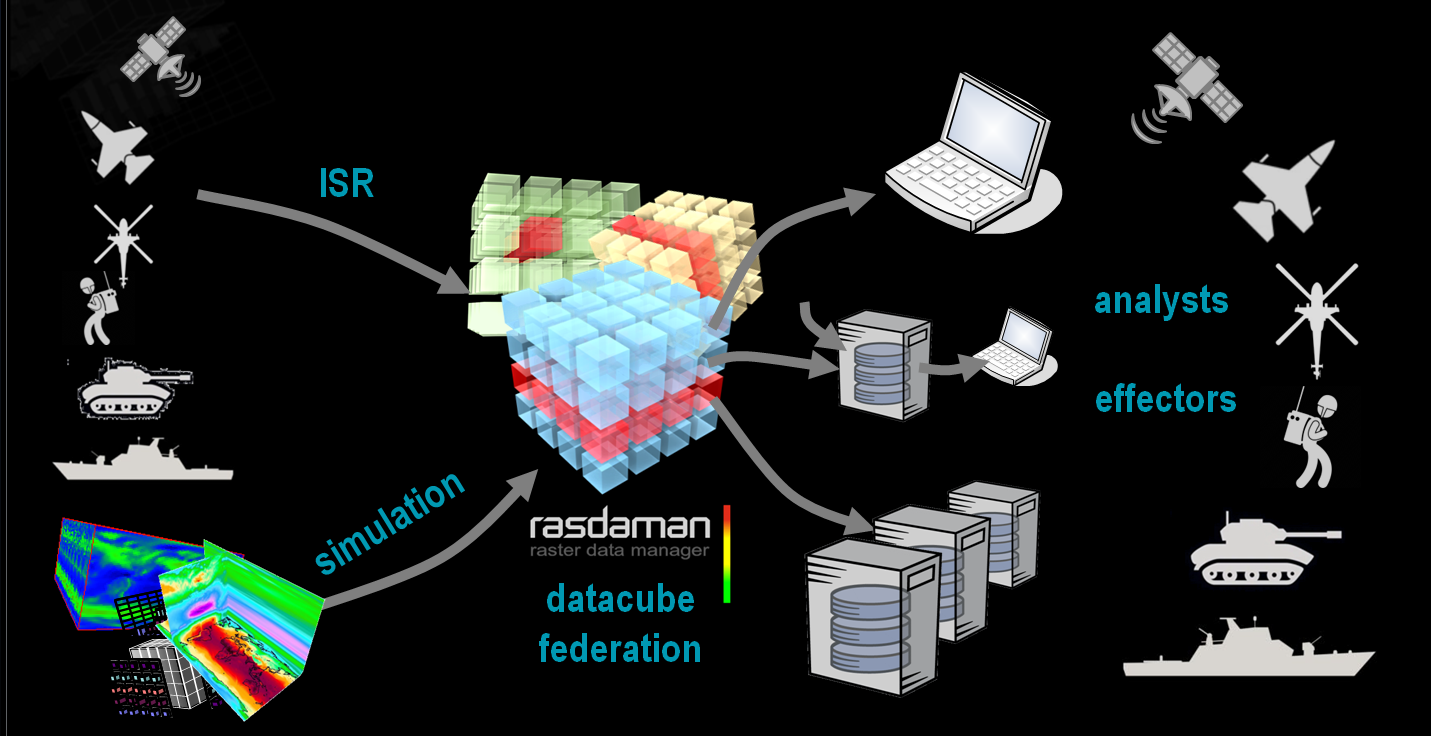
For a common integrated Recognized Environmental Picture a multitude of disparate, heterogeneous information needs to be provided and evaluated. As most of the realtime or near-realtime data come from naturally discretizing sensors, the output often represents spatio-temporal raster data.
Oftentimes, it is not sufficient to look at just output from one sensor, rather data from different sources need to be pulled together dynamically and for a variety of end devices and their users. Therefore, edge devices must be integrated efficiently into the mash-up of data sources and sinks for "any query, any time, on any device".
In short: Any type of players, both fixed (like data centers) and moving (like sensors) can act as both data sources and consumers.
In Cube4EnvSec capability demonstrations, drones and ships have been federated with large-scale archives for ad-hoc data mixing.
Capability Demonstration
Ship Demonstration
In May 2024, the GINR Sanna research vessel set sail for a cruise from Nuuk / Greenland. On board was a local server collecting bathymetry data into an onboard datacube. Via federation, realtime comparison was possible with the model bathymetry data of the Nuuk service and CoperniCUBE data from Netherlands.
Drone Federation
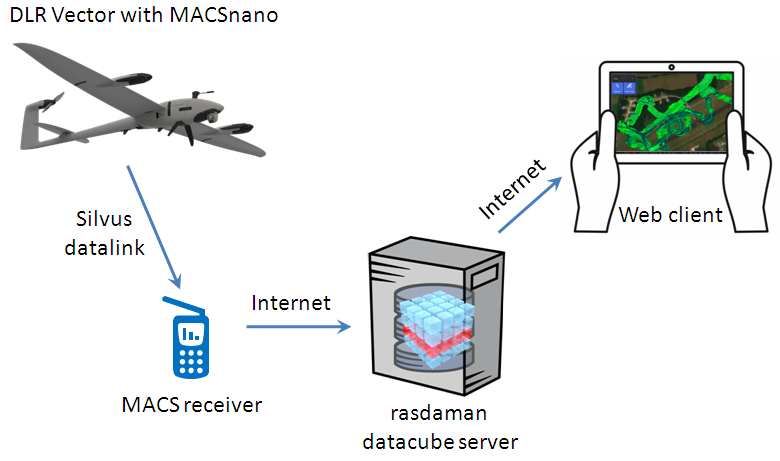
- DLR Vector drone with MACSnano camera on board flies over the Lt General Best Barracks airfield in the Netherlands, as part of the NATO C-UAS Exercise 2022.
- Drone flies various courses for different tasks, transmitting down a 2cm accurately georeferenced image via 5G to the DLR image server.
- DLR image server forwards data into the Internet, specifically: a rasdaman datacube server where the images incrementally build up the map.
- The rasdaman server, once ingested, offers the complete drone imagery via standard WMS and WMTS services.
- For presentation in the exercise tent, a WMS delivers continuous progress of the data received - in both RGB and, to show some processing on the fly, as GRVI (Green-Red Vegetation Index).
- In addition to the drone data further layers of 10m Sentinel-2 hyperspectral data and ICEYE SAR imagery were overlaid, showing the capability of merging data from different sources in realtime.
- The complete pipeline from drone to server to presentation screen in the tent incurred a latency of few seconds.
See also the image and video gallery.
User Benefit
- enhanced availability of geo data for C4ISR
- access to any data, at any time, from anywhere - fixed or moving
- ad-hoc data fusion with any tool, no need for software adaptation to heterogeneous multi-source data input
- efficient fog computing: balanced integration of edge devices and data centers for mixed processing and lowest latency
Gallery
Exercise Impressions









Client Screenshots





Videos
Drone path, RGB
Drone path, on-the-fly GRVI
Drone path, with Sentinel-2 and ICEYE SAR
Teams Engaged
- Constructor University L-SIS research group (lead)
- DLR Institute of Optical Sensor Systems, Department Security Research and Applications: Vector drone (piloted), MACSnano camera, downlink
- rasdaman GmbH: rasdaman service with realtime feed-and-extract
- ICEYE: SAR image
Terms
Image Credits: DLR, rasdaman
This information is provided as part of the Cube4EnvSec project whose Terms of Reference apply in full.